COMP3631 Intelligent Systems and Robotics
2021 - 2024
University of Leeds
Campus
The above video is a short clip with some interviews with students sharing their experience taking the module and completing a major group project.
Module Overview
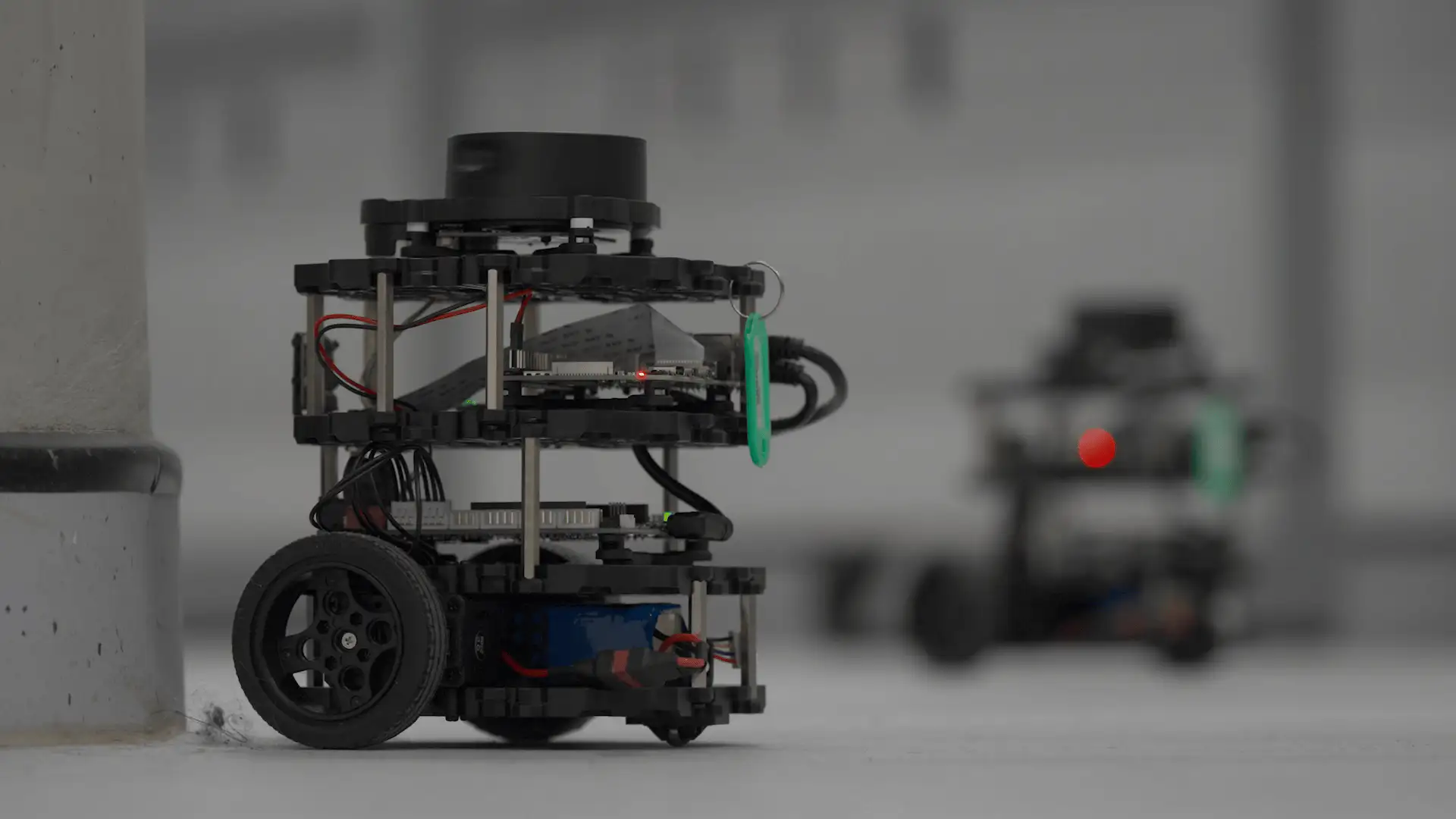
I taught a double-credit module to third year Computing and Mechatronics undergrads during the second semester between 2021 and 2024 at the University of Leeds in the UK. The module was taught on-campus to 180 students from both the School of Computing and Electronic and Electrical Engineering. Students program robots in simulation (ROS & Gazebo) and deploy the code onto a real robot (Turtlebot).
The module’s assessment comprised of lab work (10%), a major group project (40%) and a final examination (50%).
Some of the robotics topics covered in the module include:
- The Robot Operating System (ROS2)
- Motion Planning (path planners for mobile robots)
- Motion Control
- Configuration Spaces
- Robotic Arm Planning (single-query and multi-query sampling-based planning)
- Locomotion
- Kinematics (robot arm kinematics as well as differential-drive kinematics)
- Spatial Transformations
- Localisation and Mapping (Markov Localisation, Kalman Filtering and Monte-Carlo Localisation)
Gallery